Special Visit Tour 2008:
Special visit tour at All Nippon Airways Maintenance Center was held on December 10, Wednesday, 2008.
Detail explanations about the maintenance of Jumbo Jet airplane was given us.
Then we visited maintainance factories.
We had 43 participants including Prof. Nakamura, the president of Jc-IFToMM.
We would like to express special thanks to all members of the center.
Special Visit Tour 2006:
Special visit tour at Omiya Workshop of East Japan Railway Company was held on November 7, Tuesday, 2006.
At first, Mr. Hiroshi Hasegawa, General Manager of the workshop gave us detailed explanations about the company and the services to maintain train cars.
Then we visited repair factories and railway museum in the workshop.
We had 29 participants including Prof. Nakamura, the president of Jc-IFToMM.
We would like to express special thanks to Mr. Hasegawa and members of the workshop.
|
|
Special Visit Tour 2004:
Special lecture meeting and visit tour at National Defense Academy was held on November 5, Friday, 2004.
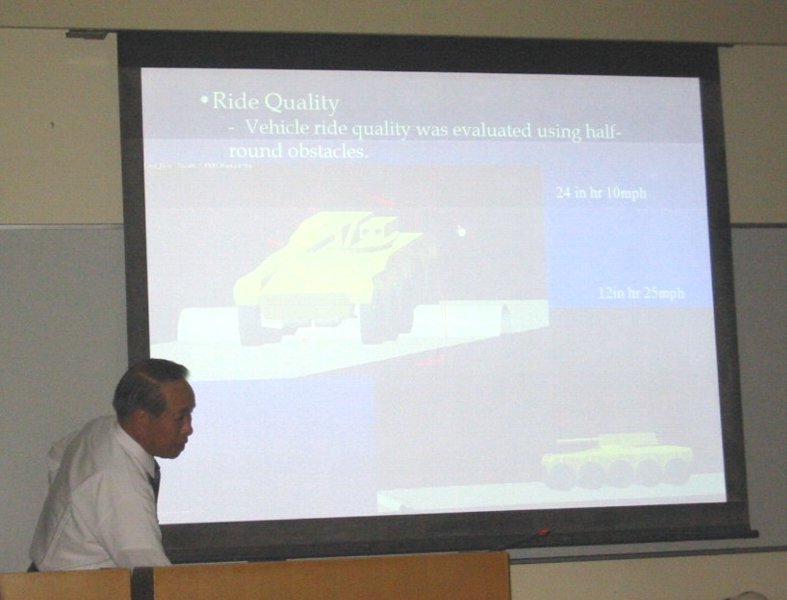
We had 45 participants including Prof. Nakamura, the vice president of Jc-IFToMM and had aspecial lecture, 'Current Status of Modeling and Simulation in Development of Tanks' by Dr.
Masanori Kitano, Emeritus Prof. of National Defense Academy.
And then we visited the following laboratories:
Matsushita Lab.,
Dept. of Mechanical Engineering | Magnetic bearing |
| Watanabe Lab., Dept. of Mechanical Engineering | Experimental field for battle vehicle |
| Taketa Lab., Dept. of Computer Science | Legged locomotive robot, Horizontal bar robot |
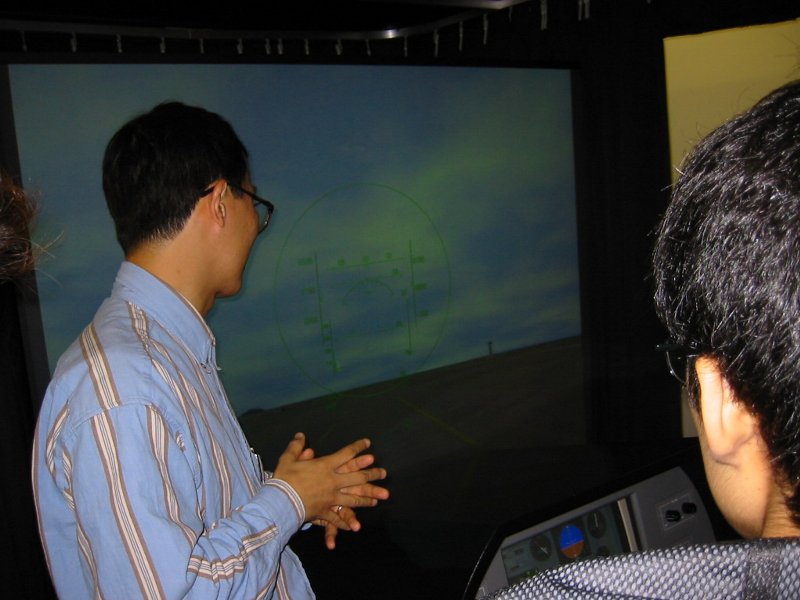
| Baba Lab., Dept. of Aerospace Engineering | Flight simulator |
After the lab tour, a wine party was held at the restaurant,' Peace Place' in the campus.
The friendship of the paticipants then was deepened very much.
We wish to express our gratitude to Profs. Masato Yashima, Osami Matsushita and Kenichi Yoshimoto, National Defense Academy, for their great cooperation to arrange the special lecture meeting and visit tour.
And we also give our special thanks to many professors and students who explained politely.
|
|
Special Visit Tour 2003:
Special visit tour at University of Electro-Communications was held on November 28, Friday, 2003.
We had 22 participants including Prof. Miura, the president of Jc-IFToMM and visited the following
laboratories:
| M.Shimojo-A.Ming Lab. |
Ultra high precision gear tester
Development of opto-magnetical encoder
Golf robot
|
| K.Tanaka-T.Tanaka Lab. |
Robot control using brain waves
Nursing robotics
|
| H. Aoyama lab. |
Desktop microrobot factory
|
After the lab tour, a wine party was held at the restaurant, Halmonia, in the university.
The friendship of the paticipants then was deepened very much.
We wish to express our gratitude to Prof. Hisayuki Aoyama, Department of of Mechanical Engineering
and Intelligent Systems, The University of Electro-Communications for his great cooperation to
arrange the visit tour. And we also give our special thanks to many professors and students who
explained politely.
|
|
|